Kinovea is a video annotation tool designed for sport analysis.
It features utilities to capture, slow down, compare, annotate, track and measure motion in videos. (Learn more).
Kinovea is completely free and open source.

We strive to build a software simple enough for use in classroom and powerful enough for olympic training.

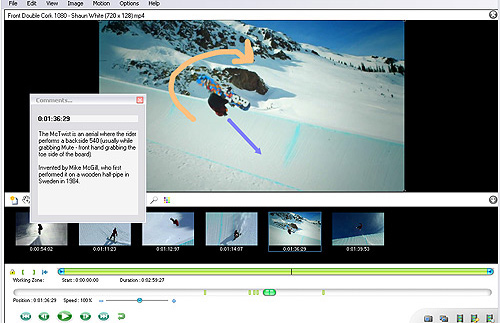
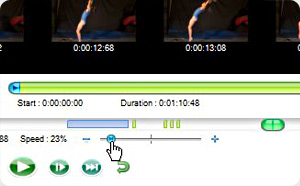
Enrich the video by adding arrows, descriptions and other content to key positions.
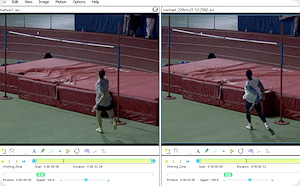
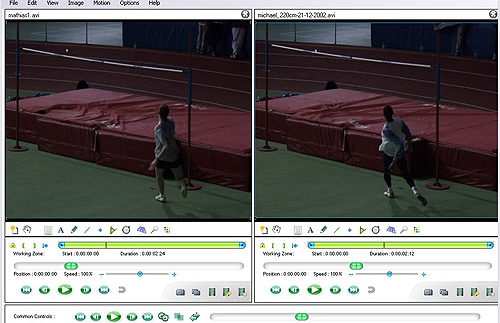
Observe two videos side by side and synchronize them on a common event.
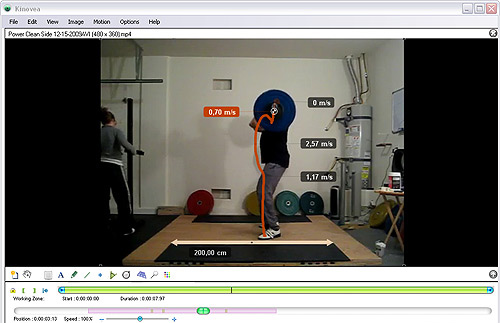
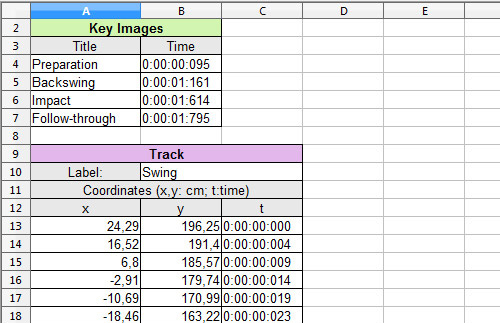
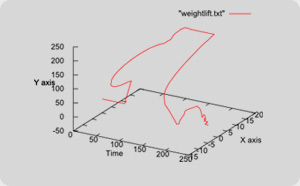
Measure angles, distances and times manually or use semi-automated tracking to follow the trajectories of points on the video.
Export your analysis to spreadsheet formats for scientific study and further processing. Create custom tools to suit specific needs.

Check our these cool projects:
Hi, I'm Joan Charmant, creator and developer of Kinovea.
I have been working on this project in some shape or form since 2004 and I'm still blown away by the continued positive reception over the years.
Kinovea takes a fair amount of time and energy and I appreciate every bit of support. I have a full-time job and work on Kinovea during my spare time.
Kinovea is completely free. No licenses, no subscriptions, no limits.
You can support the project on Ko-Fi (one-time donations) or Patreon.
I will occasionally post updates on these platforms and share early builds for testing and feedback. I'm not a fan of restricting access behind a paywall so the posts will be open to all.
Your ideas and feedback are also super valuable, if you have a specific workflow that you think could be streamlined if Kinovea did things differently or had that one missing feature… I want to hear about it.
Thanks!
Joan.



The following companies have donated hardware to help Kinovea support more devices



